开封自动轴焊接
首先来说说四轴焊接机器人,小型装配机器人中,“四轴机器人”是指“选择性装配关节机器臂”,即四轴机器人的手臂部分可以在一个几何平面内自由移动。机器人的前两个关节可以在水平面上左右自由旋转。第三个关节由一个称为羽毛的金属杆和夹持器组成。该金属杆可以在垂直平面内向上和向下移动或围绕其垂直轴旋转,但不能倾斜。这种独特的设计使四轴机器人具有很强的刚性,从而使它们能够胜任高速和高重复性的工作。在包装应用中,四轴机器人擅长高速取放和其他材料处理任务。粉碎机轴焊接是用来做什么的?开封自动轴焊接
轴焊接
合理选择焊接方法和焊接规范:为减小焊接变形,应尽可能采用高能量密度的焊接方法。如电子束焊、激光焊接、窄间隙焊接等。它们有较低的焊接线能量,焊接变形极小。在一般生产中,CO2气体保护焊来取代手工电弧焊,不但效率高,而且还能明显地减小焊接变形。焊接薄板时,可采用钨极脉冲氩弧焊或电阻焊,缝焊,都可防止压曲变形。如果在生产中没有条件采用低线能量的方法,又不降低焊接规范时,可采用直接水冷或采用水冷铜块来改变热场分布,以达到减小变形的目的。但是对于淬硬性高的金属材料,此方法慎用。吉林自动化轴焊接轴焊接设备操作简单吗?

有些设备的工作人员在遇到轴磨损的时候,想知道轴磨损可以电焊补焊吗?其实补焊是一种传统老方法,电焊的过程中相当于在给轴做热处理,所以设备的性能肯定是有所影响的。那么有没有更有效的修复方法呢?在不影响设备性能又能把磨损问题快速解决的办法。传统的补焊工艺会对轴造成造成热应力集中,轴表面出现微小裂纹,轴承位的材料出现组织变化,退火等等不良因素,使轴本身发生弯曲变形,失去原有的韧性强度。其中热应力集中,微小裂纹会对轴后期使用过程中带来巨大的安全隐患,很多重要设备的轴经过补焊后均发生了弯曲或者断裂。所以重要设备的轴,尤其是高速轴或者重载荷轴均不会采取焊接工艺处理。另外大型设备轴的修复拆装难度较大,补焊工艺在现场修复受到很大条件的限制,很难满足加工要求。而采用索雷碳纳米聚合物材料可以有效的避免这些弊端,效果也远远好于补焊工艺。
六轴焊接机器人比四轴焊接机器人多两个关节,因此有更多的“行动自由度”。六轴机器人的个关节能像四轴机器人一样在水平面自由旋转,后两个关节能在垂直平面移动。此外,六轴机器人有一个“手臂”,两个“腕”关节,这让它具有人类的手臂和手腕类似的能力。六轴机器人更多的关节意味着他们可以拿起水平面上任意朝向的部件,以特殊的角度放入包装产品里。他们还可以执行许多由熟练工人才能完成的操作。首先来说说四轴焊接机器人,小型装配机器人中,“四轴机器人”是指“选择性装配关节机器臂”,即四轴机器人的手臂部分可以在一个几何平面内自由移动。机器人的前两个关节可以在水平面上左右自由旋转。第三个关节由一个称为羽毛的金属杆和夹持器组成。该金属杆可以在垂直平面内向上和向下移动或围绕其垂直轴旋转,但不能倾斜。这种独特的设计使四轴机器人具有很强的刚性,从而使它们能够胜任高速和高重复性的工作。在包装应用中,四轴机器人擅长高速取放和其他材料处理任务。六轴焊接机器人还可以执行许多只能由熟练工人完成的操作。
旋耕起垄机是旋耕机的变形产品,所以制造时可借用旋耕机的大部分零部件,如锥齿轮箱总成、链轮箱总成、左撑板、罩壳侧板等部件,不作任何改动即可直接使用。传动轴、左右支臂焊合件、横梁焊合件、罩壳焊合件这些部件只要改变其中一零件的长度,就可用在旋耕起垄机上,其通用性和投资的经济性,对批量生产极为有利。要制造旋耕起垄机,主要是考虑刀片和刀轴的设计和制造。旋耕机中的耙刀在耕作中的主要作用是将土壤打碎,所以其形状设计成镰刀形,刀体狭窄,刀尾起垄刀片的制造以冷、热加工为主:先将材料用冲模开料、冲孔,再加热弯曲成形,磨刃口后进行热处理提高硬度。所需设备主要是:剪床、冲床、压力机、热处理设备等;工艺过程为:开料→冲孔→加热成形→磨刃→淬火→回火→清洗→喷漆
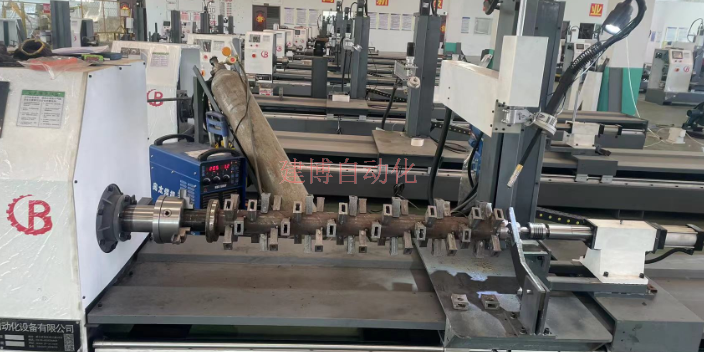
粉碎机轴焊接怎么安装?驻马店轴焊接设备
微耕机刀轴自动焊接机有什么作用。开封自动轴焊接
五轴焊接控制系统示教系统概述及示教基础知识:五轴焊接示教系统概述DMC650M-五轴焊接控制系统是基于六轴运动控制器DMC600M的硬件平台,在公司三轴仿形示教系统成熟的技术和范围较广的市场应用的基础上,根据市场需求,采纳了广大客户的宝贵意见,并参考国内外高级同类产品的一些功能及优点,经深圳市科瑞特自动化全体同仁的共同努力,推出的一款功能齐全、使用方便灵活的高级运动控制系统。在焊接机器人的设计中,焊枪移动模块的设计是整个系统设计的关键,特别是在应用上对其精度的要求比较高,因此必须对该部分的设计进行详细的指标分析和方案比较。在关键架构上,本文采用直线模组精密RV减速机直角坐标机器人系统。开封自动轴焊接
连云港建博自动化设备有限公司是一家刀轴焊接设备,旋耕机刀轴焊接,水田打浆机刀轴焊接,还田机刀轴焊接,收割粉碎机刀轴焊接,全自动上料,一键编程,智能型材切割焊接,无需编程,自动上下料,定制钻镗数控专机,一次装夹多工序自动完成,机械手自动上下料切割焊接,工装开发等。的公司,是一家集研发、设计、生产和销售为一体的专业化公司。建博自动化拥有一支经验丰富、技术创新的专业研发团队,以高度的专注和执着为客户提供智能焊接设备,智能切割设备,智能机械加工设备,智能机器人自动化设备。建博自动化不断开拓创新,追求出色,以技术为先导,以产品为平台,以应用为重点,以服务为保证,不断为客户创造更高价值,提供更优服务。建博自动化创始人徐传建,始终关注客户,创新科技,竭诚为客户提供良好的服务。